| Главная |
| Поиск по сайту |
| Полезные ссылки |
| Главная |
| Поиск по сайту |
| Полезные ссылки |
<<предыдущая страница Оглавление книги следующая страница>>
Разные приспособления.
Устройство для регулировки подгибкой.
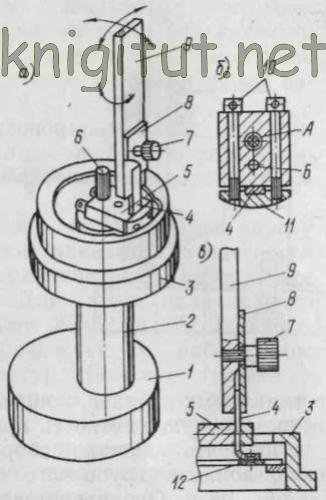
Рис. 97. Устройство для регулировки подгибкой
Устройство для регулировки подгибкой (рис. 97).
При сборке оптико-механических узлов для компенсации накопленной погрешности в звеньях узла широко используется способ регулировки путем деформации детали, являющейся замыкающим звеном размерной цепи. С целью разгрузки диафрагмы, заключенной в корпус оправы, при осуществлении регулировки ее упора подгибкой было разработано специальное устройство.
На упор 4, соединенный с кольцом диафрагмы 12, расположенной в оправе 3, надевается у основания зажимное устройство, состоящее из корпуса 5, двух винтов 10 и планки 11 (рис. 97,б). На свободный же конец упора надевается рукоятка, имеющая стержень 9, планку 8 и винт 7 (рис. 97, а). Через отверстие А корпус 5 крепится винтом 6 к колонке 2. Отверстие Б служит для фиксирования углового положения корпуса.
Колонка вместе с основанием образуют устойчивую подставку.
Гибка осуществляется поворотом стержня 9 в любом направлении без нагружения всего механизма и, следовательно, без возникновения опасности его деформации (направления гибки указаны стрелками).
Величину подгибки определяют либо на глаз, либо по индикатору, для чего последний устанавливают на стойке, жестко связанной с основанием, а его измерительный стержень упирают в рукоятку.
Устройство надежно и удобно в работе. Его применение исключило брак, возникающий вследствие деформации механизма при подгибке упора.
Рассмотренный способ регулировки подгибкой может быть использован при сборке различных узлов точной механики; для них соответственно должно быть спроектировано и изготовлено зажимное устройство, соединяющее жесткую часть узла (корпус, плату, кронштейн) с основанием рычага, колонки или планки, подлежащих подгибке. При этом, чем ближе расположено крепление к основанию рычага, тем легче осуществлять деформацию.
return_links(); ?>